2:09 pm
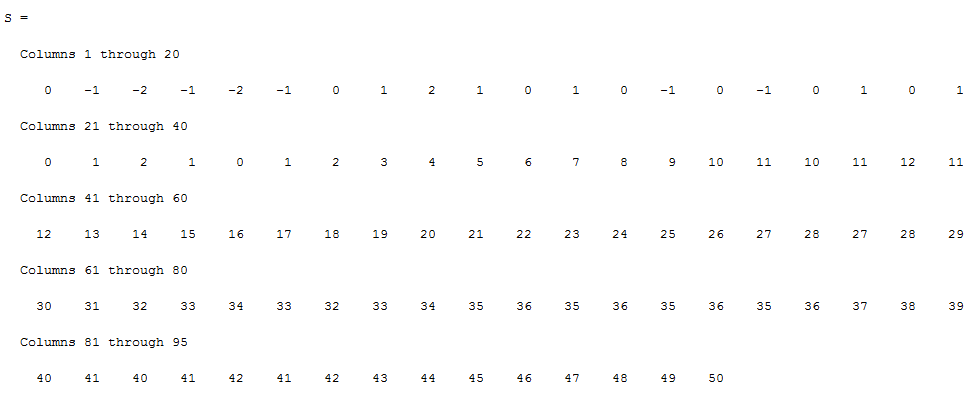
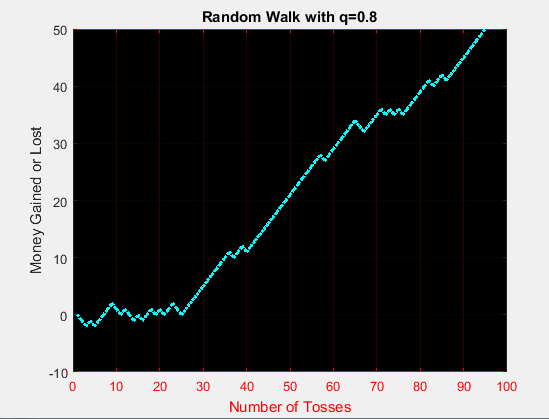
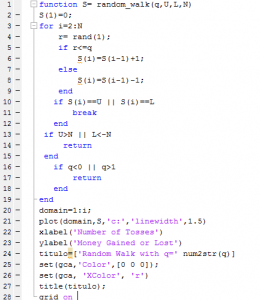
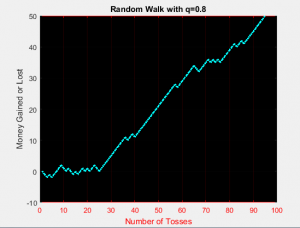
Today was better paced than yesterday if you ask me. We started the day by learning how to use MATLAB. MATLAB is a computational language used mainly for math and problem solving. Because everyone who is working in this internship already knows programming and coding concepts, all we really needed to learn was the syntax. As an example, for the sake of learning MATLAB and putting it to use, we created code to plot randomized results of throwing a coin up. In this code, we wrote a function with 4 variables including q, U, L, N (MATLAB is case sensitive). We defined q as probability (the probability being 0.5 since its a two sided coin), U as the upper limit, L as the lower limit and N as a randomized result of said coin. Attached is the code along with an image of the plot with q=0.8, U=-10, L=50 and N=100.
After working with MATLAB, Dr. Ceberio assigned us 2 problems to solve. The problems including one that asked, there are eight identical-looking coins; one of these coins is counterfeit and is known to be lighter than the genuine coins. What is the minimum number of weighings needed to identify the fake coin with a two-pan balance scale without weights? The other question was that 4 people meed to walk across a bridge at night. The bridge is weak and only able to carry the weight of two of them at a time. Because they are in a rush and the light is fading they must cross in the minimum time possible and must carry a flashlight on each crossing.
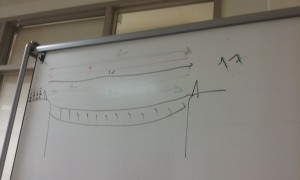
They only have one torch and it can’t be thrown. Because of their different fitness levels and some minor injuries they can all cross at different speeds. The first person can cross in 1 minute, the second in 2 minutes, the third in 5 minutes and the fourth in 10 minutes. What is the minimum amount of time it would take for them to cross? The five of us in this internship put our brains together and started working on the second problem first. The first idea, the one almost everyone will immediately consider would have taken 18 minutes with the first trip being the 1 minute person with the 10 minute person, the 1 minute person returns, then the 1 minute person goes with the 5 minute person and again the 1 minute person returns for the 2 minute person. Although this is a solution, we all knew there had to be a better solution. We continued working together and after not too much time, we came up with a solution that takes 17 minutes. When we got assigned these questions, Dr. Ceberio told us to keep in mind a question that she asks her college students, that question being “Would you bet your house on it?” The purpose of this question is to really ask yourself if this is as good as you can get and if it isn’t the best, then keep working. The five of us all agreed that with our 17 minute solution, we would bet our house on it. Attached is the visual we made to really take this question into consideration. Its a little faded but I figured it was worth showing. Our end solution was to have the 1 minute person go with the 2 minute person, have the 1 minute person go back and then the 10 minute person and 5 minute person go back together and finally the 2 minute person returns for the 1 minute person.
On the first question we were asked, that one was a lot easier to think of. Raquel and I took a binary approach and everyone agreed it was the best solution. We found that by putting 4 and 4 coins in the both sides of the balance beam, take the lighter sized and put two and two, then take the lighter sized and finally 1 against 1 and there you have the counterfeit coin.
After the questions, we saw what Angel (one of our mentors) was able to do using python turtle and started thinking about what we are interested in doing with python. As of right now, I am mostly considering just making a trippy design using stamps.